
Produits

palettiseur automatique de portique de boîte de carton
Brève description :
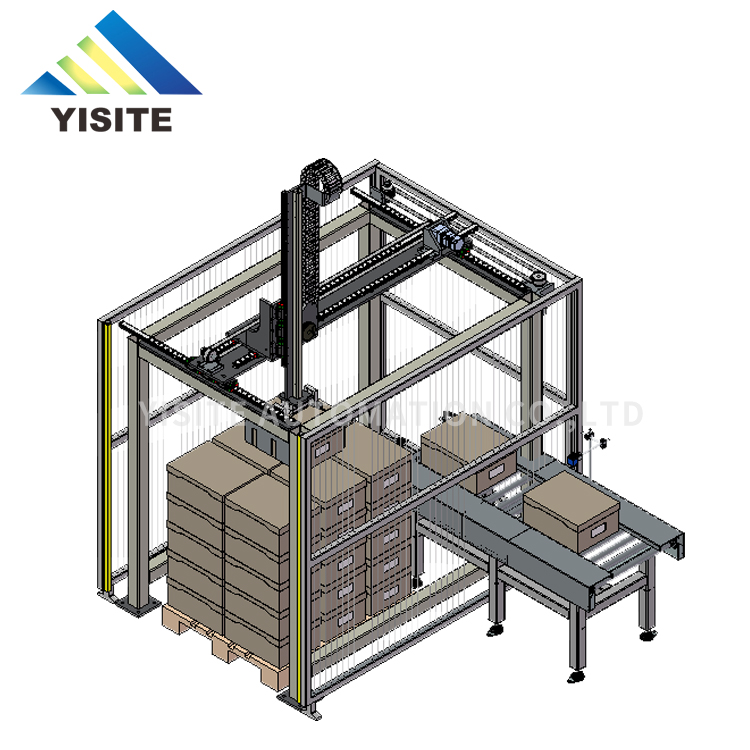
Présentation du produit du palettiseur automatique à portique de boîte en carton : L'unité principale du palettiseur est composée d'un chariot qui peut avancer et reculer, d'un cadre et d'une plate-forme de transport qui peut être soulevée de haut en bas. La taille et le luminaire peuvent être personnalisés.
Le palettiseur automatique à portique de boîte en carton est doté d'une conception spéciale de poignée pneumatique, d'une pression réglable, équipée d'une valve tampon de pression, de sorte que l'action de préhension équipée d'un mécanisme d'induction puisse percevoir automatiquement l'objet et informer le centre de contrôle de la saisie de l'objet.

à propos de nous

Nous sommes un fabricant professionnel d’équipements d’automatisation personnalisés. Nos produits comprennent un dépalettiseur, une machine d'emballage pick and place, un palettiseur, une application d'intégration de robot, des manipulateurs de chargement et de déchargement, une formation de cartons, un scellage de cartons, un distributeur de palettes, une machine d'emballage et d'autres solutions d'automatisation pour la ligne de production d'emballages back-end.
Notre superficie d'usine est d'environ 3 500 mètres carrés. L'équipe technique de base possède en moyenne 5 à 10 ans d'expérience en automatisation mécanique, dont 2 ingénieurs en conception mécanique. 1 ingénieur en programmation, 8 ouvriers d'assemblage, 4 personnes de débogage après-vente et 10 autres ouvriers
Notre principe est « le client d'abord, la qualité d'abord, la réputation d'abord », nous aidons toujours nos clients à « augmenter la capacité de production, réduire les coûts et améliorer la qualité ». Nous nous efforçons de devenir l'un des principaux fournisseurs de l'industrie de l'automatisation des machines.
Manipulateur d'empilage de cartons entièrement automatique Truss XYZ
1. Composition du gerbeur
La machine de palettisation est composée d'un cadre d'installation, d'un système de positionnement, d'un système de servomoteur, d'un système de contrôle, d'un système de contrôle et de distribution électrique, d'un dispositif de protection de sécurité, etc., équipé d'un système de positionnement automatique de l'alimentation. (Système d'alimentation automatique de la pile en option)
2. Support de montage pour empileuse
Parce que la vitesse de déplacement de l'empileur est très rapide, l'état de départ a un grand impact sur le cadre de montage. Le cadre d'installation doit être très rigide pour assurer le fonctionnement stable de l'empilage, nous avons donc conçu la structure du cadre en acier soudé comme le cadre de support.
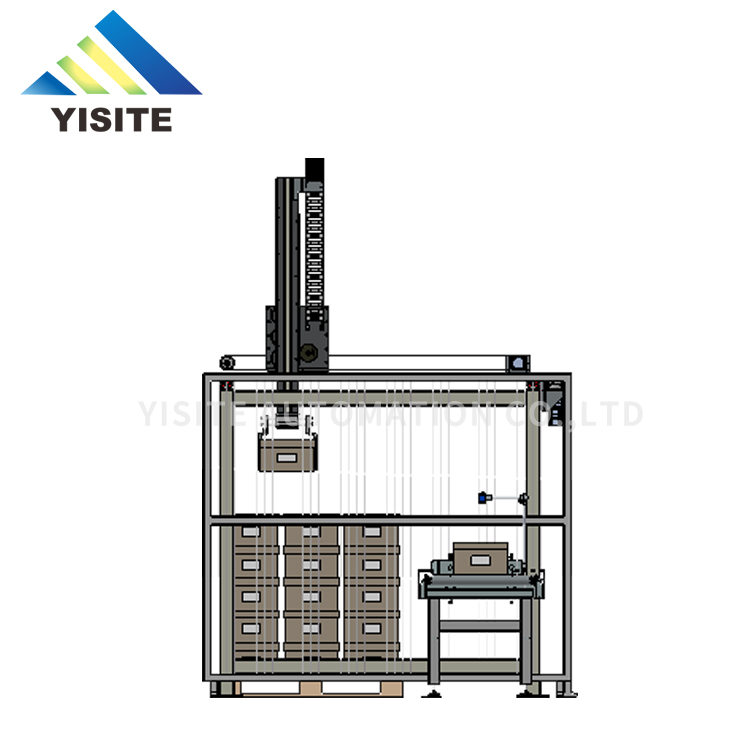
3. Système de positionnement de la machine de palettisation d'empileur
Le système de positionnement du gerbeur est au cœur de l'ensemble de l'équipement, est le produit de la société Yaskawa (Japon), vitesse de mouvement rapide et précision de répétition est élevée, trois coordonnées X, Y, Z sont sélectionnées pour la transmission synchrone par courroie crantée, coordonnée unique la précision du positionnement répété est de 0,1 mm, vitesse de mouvement de ligne rapide : 1 000 mm/s. L'axe X est un système de positionnement unique avec une longueur unique de 3 000 mm et une portée de 1 935 mm. L'émetteur synchrone assure le mouvement synchrone des deux systèmes de positionnement et est entraîné par un servomoteur de 1 500 W. Pour faire correspondre le couple moteur et l'inertie, il existe un réducteur planétaire de haute précision.
L'axe Y utilisant un système de double positionnement. La raison pour laquelle l'unité de positionnement a une si grande section transversale est principalement due au fait que l'axe Y est un support à double extrémité avec la structure de suspension centrale. Si la section transversale sélectionnée n'est pas suffisante, la stabilité du mouvement du robot ne sera pas garantie et le robot tremblera lors du déplacement à grande vitesse. Deux unités de positionnement sont utilisées côte à côte pour clipser l'axe Z au milieu et équilibrer la charge bien. Ce mode d'installation présente une très bonne stabilité. Les deux systèmes de positionnement sont entraînés par un servomoteur de 1 500 W, équipé d'un réducteur planétaire de haute précision pour faire correspondre le couple d'entraînement et l'inertie.
Le système de positionnement de l'axe Z est ferme et stable. Le produit a généralement le curseur fixe et le mouvement global de haut en bas. Le servomoteur doit améliorer l'objet rapidement, ce qui doit surmonter une grande gravité et une force d'accélération, et nécessite une plus grande puissance. .En pratique, nous avons choisi un servomoteur de 2000W, équipé d'un réducteur planétaire de haute précision. L'axe A est l'axe de rotation.
4. Système de servomoteur
La machine manipulatrice d'empilage utilisant un servomoteur avec fonction numérique. Chaque arbre moteur est équipé d'un servomoteur et d'un réducteur, de quatre servomoteurs et de quatre réducteurs, y compris un moteur vertical avec servomoteur de verrouillage.
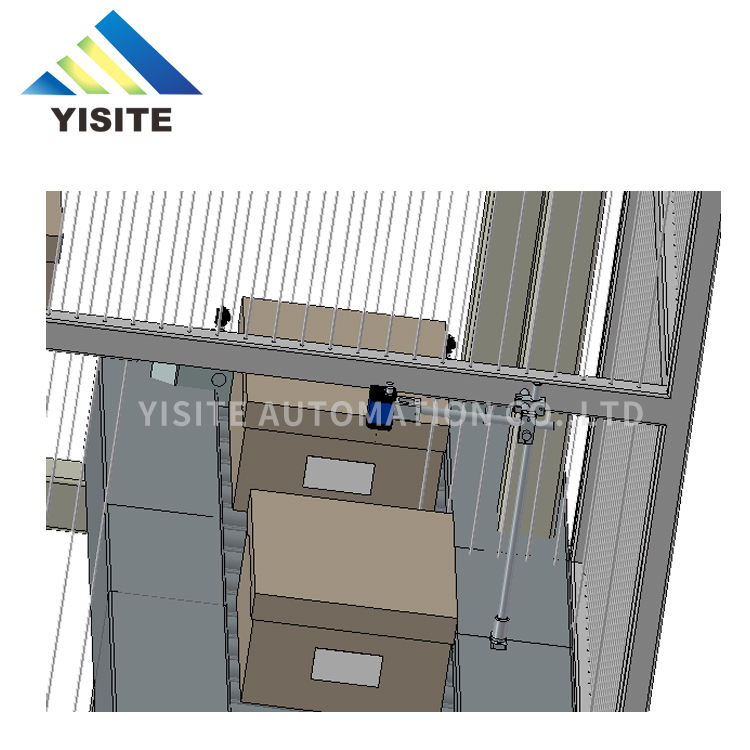
5. Poignée de l'empileur
L'empilage avec une conception spéciale de poignée pneumatique, pression réglable, équipé d'une valve tampon de pression, de sorte que l'action de préhension équipée d'un mécanisme d'induction, puisse automatiquement percevoir l'objet et informer le centre de contrôle de la saisie de l'objet.
6, système de contrôle
Le système de contrôle se compose d'un grand API et d'un écran tactile. Le système dispose de puissantes capacités de programmation. Avec différents modèles de palettisation, le système peut prédéfinir une variété de programmes d'artefacts et, pour remplacer le programme correspondant, peut être utilisé sur l'écran tactile.
7, dispositif de sécurité
La machine dispose d'une fonction d'invite de panne et d'alarme, et chaque défaut peut refléter avec précision l'emplacement spécifique, éliminer facilement et rapidement les défauts, notamment : fonction de protection contre les collisions du robot ; détection de l'installation de la pièce en place ; protection de sécurité contre la lumière.
Paramètres techniques
1. Modèle de machine : YST-MD1500
2. Capacité d'empilage : 200-500 cartons/H
3. Cadre : SS41 (traitement plastique par injection d'acier A3) arbre en acier à roulement S45C
4. Alimentation : CA, triphasé, 380 V, 9 kW 50 Hz.
5. Consommation d'air : 500NL/MIN (consommation d'air : 5-6kg/cm2)
6. Dimensions de l'équipement : (L) 3 500 mm (L) 2 250 mm (H) 2 800 mm (dépend de la conception réelle de l'aménagement)
7. Poids de l'équipement : 1 500 kg


Configuration du principal avantage
1. servomoteur de marque Yaskawa
2. Réducteur de vitesse de marque Taiwan
3. PLC Mitsubishi (Japon)
4. Le contacteur et les interrupteurs doivent être utilisés dans Schneider
5. Capteur photoélectrique Omron
6. Action d'affichage du contrôle d'interface, état d'alarme et fonction d'alarme
7. Convertisseur de fréquence de marque Yaskawa
8. Le cadre et les panneaux latéraux sont en acier au carbone
9. Éléments pneumatiques Taiwan AirTac
10. Sucker de la marque italienne PIAB









