
Le robot à portique se compose d'un cadre de colonne, d'un composant d'axe X, d'un composant d'axe Y, d'un composant d'axe Z, d'un dispositif de fixation et d'un boîtier de commande.
Il s'agit d'un équipement industriel entièrement automatique basé sur le système de coordonnées tridimensionnelles rectangulaires X, Y, Z, qui peut ajuster la position de la pièce ou réaliser le mouvement de trajectoire de la pièce. Son noyau de contrôle est mis en œuvre via des contrôleurs industriels.
Le contrôleur analyse et traite divers signaux d'entrée, effectue des jugements logiques, puis émet des commandes d'exécution à chaque composant de sortie pour compléter le mouvement conjoint entre les axes X, Y et Z et réaliser un ensemble complet de processus de fonctionnement entièrement automatiques.
Il est utilisé dans l'assemblage et le transport de produits, les systèmes de convoyeurs et les chantiers sans personnel. Il peut être utilisé comme équipement périphérique important pour le stockage temporaire et la logistique et peut être associé de manière flexible à l'équipement hôte pour une utilisation facile. Industries d'application impliquées dans : l'assemblage final, le sous-assemblage, le traitement, les tests, le débogage et le transport des produits, etc.
Les caractéristiques du produit visent à aider les clients à résoudre les problèmes de faible efficacité ou de risques de manutention élevés dans divers types de manutention de matériaux, de manière à réduire facilement et rapidement les risques de manutention, à gagner du temps, des efforts, à économiser de la main d'œuvre et même à remplacer la main d'œuvre.
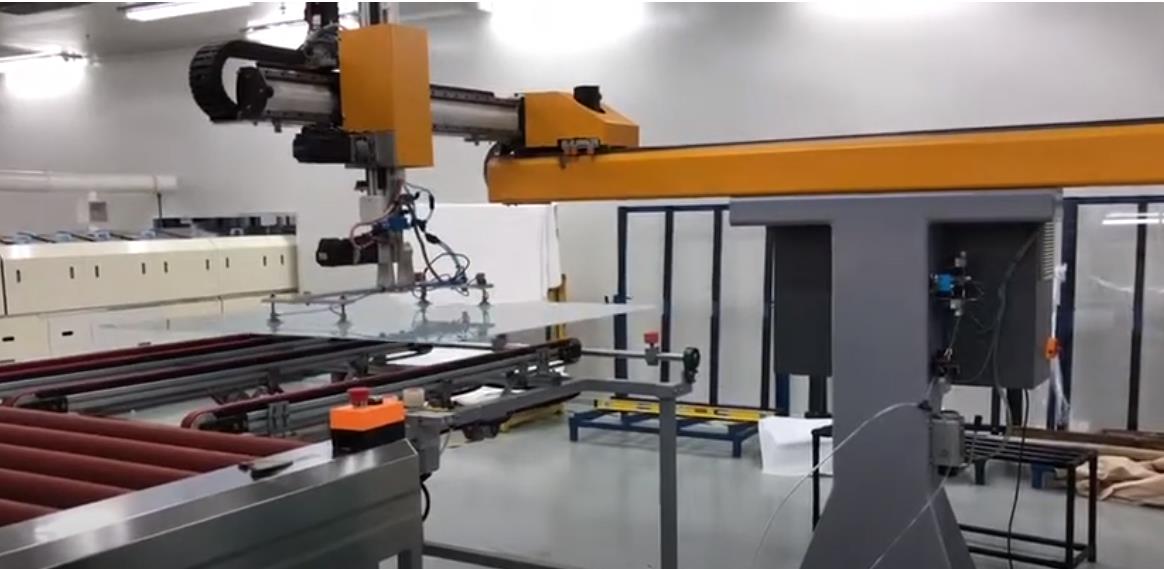
 Ce dispositif de manutention de manipulateur à treillis à portique pour le verre comprend des colonnes et des traverses installées sur les colonnes. Les traverses sont installées avec des glissières. Les glissières sont installées avec un dispositif coulissant transversal. Le dispositif coulissant transversal est installé avec un dispositif coulissant vertical et un dispositif à ventouse pneumatique. Cela peut être réalisé. Le mécanisme de transport se déplace à un point fixe dans l'espace tridimensionnel, aspire le verre à travers la ventouse, se déplace d'abord latéralement sur l'axe X, puis retourne à 90 degrés jusqu'à la position désignée, puis monte. et vers le bas sur l'axe Y. Après avoir atteint la position réglée, relâchez le verre et placez-le sur la grille en verre. La stabilité structurelle de l'ensemble du dispositif est très élevée, ce qui améliore considérablement la manipulation. efficacité.
Ce dispositif de manutention de manipulateur à treillis à portique pour le verre comprend des colonnes et des traverses installées sur les colonnes. Les traverses sont installées avec des glissières. Les glissières sont installées avec un dispositif coulissant transversal. Le dispositif coulissant transversal est installé avec un dispositif coulissant vertical et un dispositif à ventouse pneumatique. Cela peut être réalisé. Le mécanisme de transport se déplace à un point fixe dans l'espace tridimensionnel, aspire le verre à travers la ventouse, se déplace d'abord latéralement sur l'axe X, puis retourne à 90 degrés jusqu'à la position désignée, puis monte. et vers le bas sur l'axe Y. Après avoir atteint la position réglée, relâchez le verre et placez-le sur la grille en verre. La stabilité structurelle de l'ensemble du dispositif est très élevée, ce qui améliore considérablement la manipulation. efficacité.

Heure de publication : 18 mars 2024



